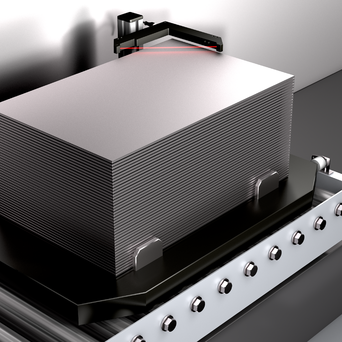
Contrôle de hauteur de pile
Dans une cellule robot, le robot saisit toujours la tôle supérieure d’un chargeur pour procéder à sa transformation. Grâce à la fourche optique angulaire OGL dotée d’une précision de commutation élevée et d’une reproductibilité de 0,03 mm, la tôle suivante est repositionnée. Elle vérifie également le retrait de la tôle et se désactive en conséquence. Le paramétrage et le diagnostic s’effectuent via IO-Link. Ainsi, il n’est pas nécessaire d’accéder à la zone dangereuse de la cellule robot.
